
 Copper Runtime & SDK
Copper Runtime & SDK
![]()

![]()


Why Copper
Rust-first – ergonomic & safe
Sub-microsecond latency – zero-alloc, data-oriented runtime
Deterministic replay – every run, bit-for-bit identical
Interoperable with ROS2 – bridges via Zenoh opening the path for a progressive migration.
Runs anywhere – from Linux servers, workstations, SBC to bare-metal MPUs
Built to ship – one stack from simulation to production
Already showing up in: ✈️ Flying | 🚗 Driving | 🌊 Swimming | 🚀 Spacefaring | 🤖 Humanoids
Try Copper In One Click In Your Browser
No setup required. Open one of the live demos in your browser: the simulator runs on the left and the live Copper monitor runs on the right.
These are not mockups: BalanceBot is the exact same application that runs on a Raspberry Pi physical robot, and Flight Controller is the same control stack we run on a microcontroller (STM32H7) on real drones. Copper lets that same graph be recompiled for embedded hardware, a local workstation, or the browser.
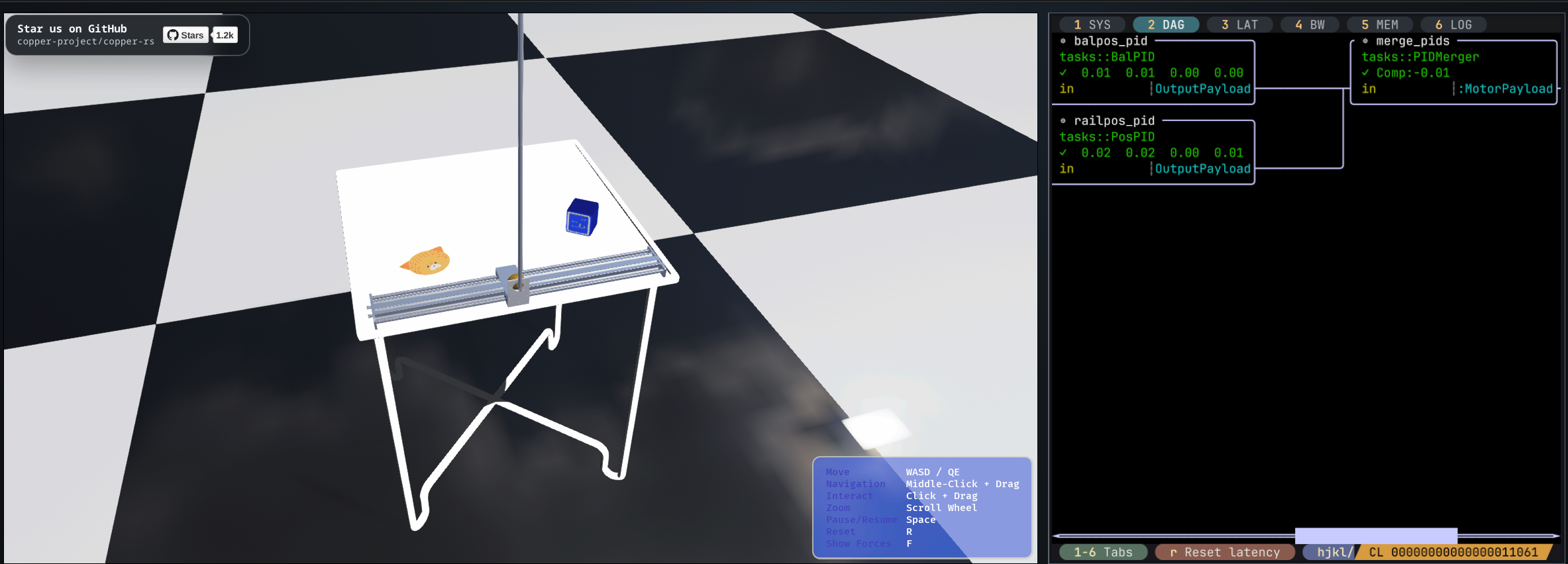
BalanceBot Self-balancing robot sim with a live Copper DAG and latency monitor. Source code |
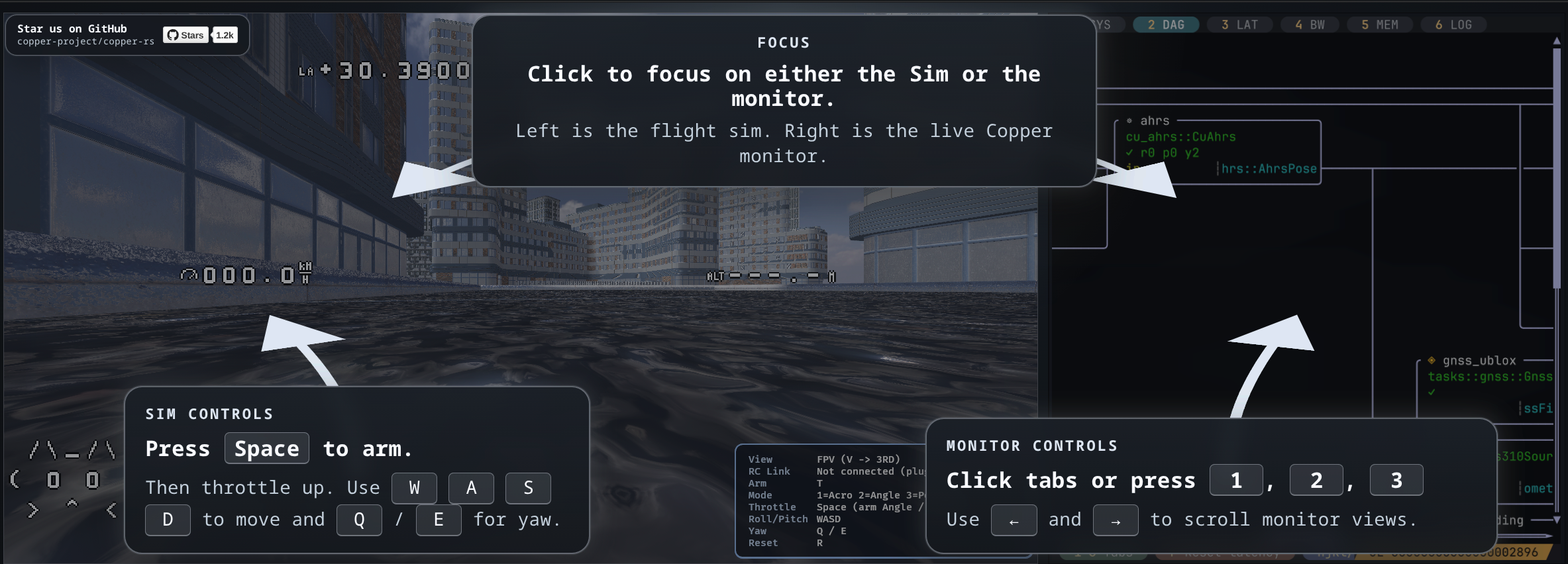
Flight Controller Quadcopter flight sim with the same live Copper monitor. Source code |
Prefer a native app instead of the browser? Install the published demo crates from crates.io:
cargo install cu-rp-balancebot
balancebot-sim
cargo install cu-flight-controller
quad-sim
The source for the published demo crates above lives in examples/.
Cross-framework comparison benchmarks live in benchmarks/.
Want to see more Copper in action? Watch the community showcase video.
Get Started
- Requires Rust 1.95 or newer. The latest stable Rust toolchain is recommended.
Zero To Your First Copper App in 30 Seconds
cargo install cargo-cunew
cargo cunew hello_copper
cd hello_copper
cargo run
cargo cunew is the primary Copper bootstrap path. It generates a minimal
source -> task -> sink application. cargo run starts the app, prints the
first messages (Received message: 42, then Sink Received message: 43), and
records to logs/hello-copper.copper; stop it with Ctrl-C when you've seen
enough. If you have just installed, the generated project also includes
helpers like just log, just cl, and just resim. To get situated, open
copperconfig.ron, src/main.rs, src/tasks.rs, and justfile.
- Start a new project from templates: Project Templates
- Browse the live component catalog: Copper Component Catalog Community components are welcome there too; if you build a reusable Copper component, prefer publishing it as its own crate and adding it to the catalog.
- See a full task graph + runtime walkthrough: Copper Application Overview
- Build and deploy an application: Build and Deploy a Copper Application
- RON configuration reference: Copper RON Configuration Reference
Documentation
Link to the full documentation
- Runtime concepts and SDK features: Copper Runtime Overview
- Task lifecycle: Task Lifecycle
- Modular configuration: Modular Configuration
- Task automation: Task Automation with just
- Coverage report: Coverage Report
- Supported platforms: Supported Platforms
- Bare-metal development: Baremetal Development
- Component catalog: Copper Component Catalog
- FAQ: FAQ
- Release notes: Copper Release Notes
- Roadmap: Roadmap
Python Support
Copper has two very different Python stories:
- Offline Python log analysis: use
cu29-exportand app-specific PyO3 modules in the application crates that expose them. This is a reasonable workflow because Python stays off the runtime hot path. - Runtime Python task prototyping: use components/tasks/cu_python_task and examples/cu_python_task_demo. This is for experimentation only and is strongly not recommended for production or realtime robots.
Putting Python inside a Copper task defeats the performance model Copper is built for: it adds allocations, latency, jitter, and middleware overhead, and it ruins the realtime characteristics of the stack. The intended use is to sketch one task in Python, get the behavior right, then rewrite it in Rust.
Citation
If you use Copper-rs in your research, please cite it as:
@misc{copperrs2026,
author = {Guillaume Binet and Copper Project contributors},
title = {Copper-rs: A deterministic runtime and SDK for robotics},
year = {2026},
howpublished = {GitHub repository},
url = {https://github.com/copper-project/copper-rs},
note = {Version v1.0.0-rc2 or latest}
}
Project
[!NOTE] We are looking for contributors to help us build the best robotics framework possible. If you are interested, please join us on Discord or open an issue.